Previous posts illustrated hardware building
Charlieplexed displays (
1
2 3
4). However, building the display hardware is only half the
work:
one also needs a display driver.
This post covers strategies for writing firmware to drive Charlieplexed LED displays. I'll be working with the
Arduino Uno, which uses the
AtMega328 microcontroller.
These strategies are general, but the hardware-specific optimizations
will need to be adapted if using a different microcontroller.
This post walks through the basics of bringing up custom display driver code for a new LED display, including:
- Testing the display after soldering
- Row/column scanning for brighter Charlieplexed displays
- Display memory buffers
- Getting good performance by optimizing IO operations and the display memory format
- Scanning the display using timer interrupts
- Double buffering to improve animations
It also briefly outlines some extensions that may be of interest
- Achieving graded brightness values
- How to mix LEDs of different colors (different forward voltages) in one grid
- Cheating on current limits to get brighter displays
Finally, there are some (hopefully) useful notes in the appendix
- LED resistor calculations for Charlieplexed LED displays
- Timer interrupts on the AtMega328 with the Arduino platform, in detail.
0. Build the display
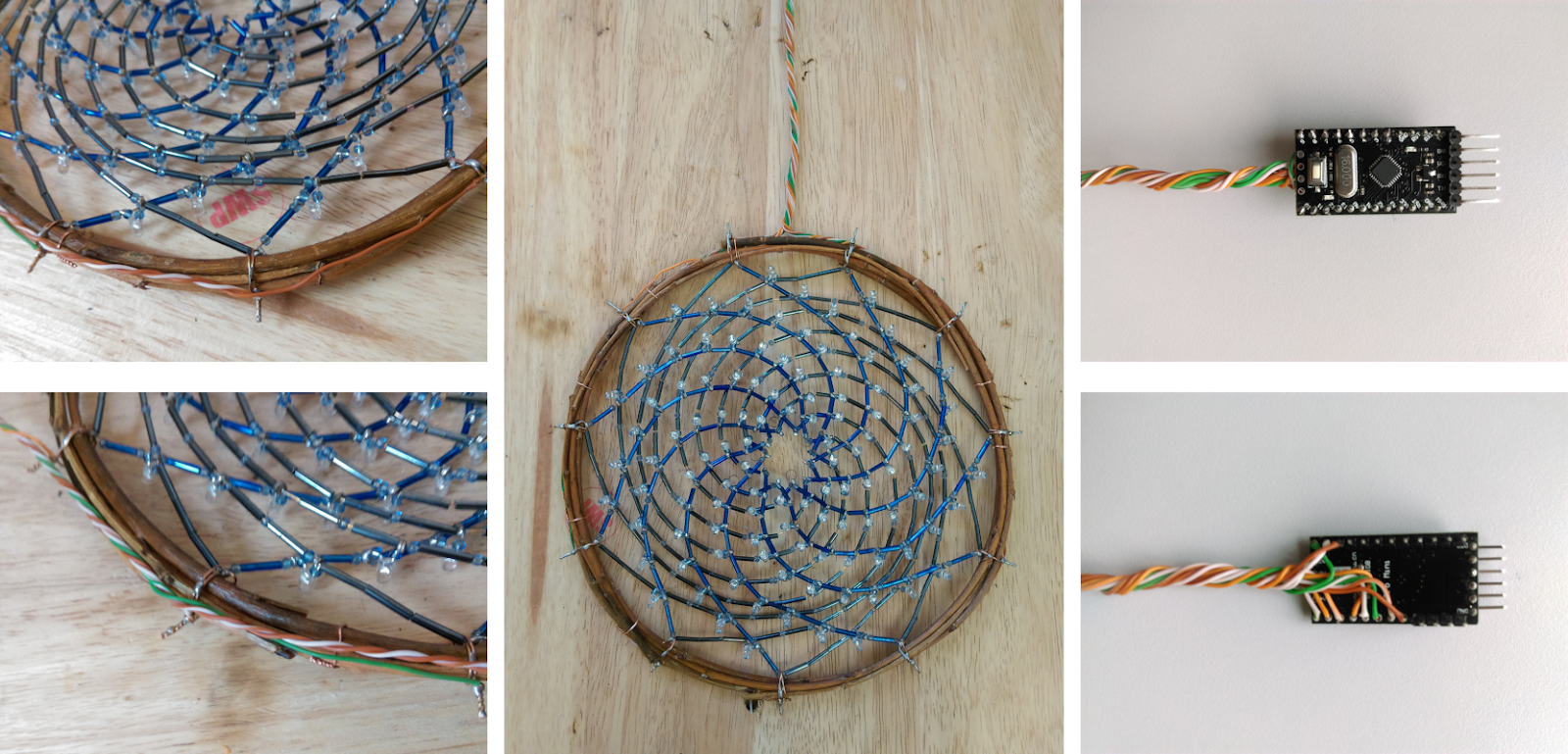
I've constructed my LED display out of discrete 3 mm LEDs, placed on
cardboard from a cereal box using a template. The 'diagonal Charlieplexing' layout is, I think,
the easiest for hand-crafting, since it gets the maximum number of LEDs using the smallest amount of wire and microcontroller IO pins. This particular build is a larger multi-color version of the
Fibonacci spiral layout, and the construction steps are similar.
The basic steps are:
- Prepare a template for the LED layout, and attach this to some thin but stiff cardboard
- Perforate the cardboard for the component leads, and place components
- Connect and solder the components
Depending on how you attach the components, it may or may not be easier to do steps (2) and (3) concurrently.
| Make a cardboard PCB |
Attach components |
Connect and solder |
 |
 |
 |
p.s.: It took me about a month to finish the hardware, a little bit each day. Like knitting.
1. Test the display one light at a time

The first thing to do is to verify that all LEDs work.
Before starting, ensure that all control lines have appropriate
current-limiting resistors to avoid damaging the LEDs (it is frustrating to burn out
a LED matrix before even getting started).
I'm working on a 306-light project that uses 18 control lines (the
maximum number that one can use on the Arduino Uno while still leaving
the serial pins free). I've arranged the display in a circular pattern,
but these code examples will assume an ordinary rectangular layout for
simplicity.
The Arduino sketch below will light-up each LED in a Charlieplexed
display in sequence. Follow the steps in the top comment to adapt it to
your project.
/**
* - Build Charlieplexed display hardware
* - Hook up all lines with appropriate current-limiting resistors
* - Set the constant NPINS to the number of lines
* - Place the Arduino pin numbers used in the `pinmap` array
* - Upload this sketch and confirm that all lights work
*/
#define NPINS 18
const int pinmap[NPINS] = {
2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17
};
void setup() {
// put your setup code here, to run once:
}
void loop() {
// put your main code here, to run repeatedly:
for (int j=0; j<NPINS; j++)
for (int i=0; i<NPINS; i++)
{
if (i==j) continue;
int anode = pinmap[i];
int cathode = pinmap[j];
// Turn everything off
for (int line=0; line<NPINS; line++)
pinMode(pinmap[line],INPUT);
// Turn on one anode-cathode pair
digitalWrite(cathode,LOW );
digitalWrite(anode ,HIGH);
pinMode(anode ,OUTPUT);
pinMode(cathode,OUTPUT);
delay(1);
}
}
Before turning on the next light, we first set all pins to
INPUT mode, with pull-up resistors disabled. This avoids triggering any LEDs accidentally as we switch the other pins.
For full source code see sketch
Example 1.
Dead pixels

For home-made displays, I usually have a few LEDs that are burnt out
or installed backwards. Testing the display will reveal such 'dead
pixels', and now is good time to replace or re-solder them.
In Charlieplexed displays, attempting to light a dead pixel will
cause current to flow in unexpected ways, spuriously lighting up the
wrong LEDs. Sometime it is impractical to replace broken LEDs. For now,
it suffices to note the anode and cathode pin numbers of any dead
pixels. We can explicitly avoid turning them on in the display driving
code late to avoid this issue.
Note: Watch out for quality control in bulk discrete LEDs. I
usually find some where the anode/cathode labels are reversed, or where
the LED isn't embedded properly in the plastic housing. (Mechanical
stability is especially important for home-made projects, since movement
during use or soldering can break the connection between the LED chip
and its leads.) I often check each LED before soldering.
2. Row/column scanning
Lighting LEDs individually works for small projects, but not for
large ones. As the number of lights increases, the fraction of time that
each light spends on decreases, making the display dim. There also
isn't enough time to scan a large number of lights without introducing
noticeable flicker.
The solution is to scan an entire row or column of the matrix at
once. One can drive multiple LEDs simultaneously by (e.g.) turning on
one anode and multiple cathodes (but take care not to over-current the
microcontroller IO pins). Appendix 1 (at the end of this post) gives
notes for setting resistor values, but the usual series resistance for
lighting a single LED is a good upper bound.
Single-light scanning
-
Good: If only a sparse subset of the LEDs are on at a given time, this can lead to a brighter and more uniform display.
-
Bad: The display will be dim if there are many LEDs to scan, and this approach fails if a large number LEDs need to be lit.
Row/Column scanning
-
Good: Reduces the amount of CPU time needed to scan the display. Reduces flicker and increases brightness for large displays.
-
Bad: Current-limiting resistors set a fixed current per
row or column. This means that the brightness depends on the number of
LEDs being lit per row/column, which can lead to non-uniform brightness
if not compensated in software. Handling displays that mix LEDs with
different forward voltages is also more complicated.
Here is an Arduino sketch to test common-anode row/column scanning of a Charlieplexed display. (Set
NPINS to the number of LED control lines in your project, and define the Arduino pin number for each line in the
pinmap variable.)
/**
* - Set up the electronic circuit, with appropriate series resistors
* to protect the LEDs *and* *microcontroller* if something goes wrong.
* - For common-anode row/column scanning:
* - Set all pins to INPUT mode to avoid spuriously lighting LEDs
* - Set the anode pin to HIGH and all others to LOW
* - Switch to OUTPUT mode the anode, and any cathods from this row
* that you wish to light up.
*/
#define NPINS 18
const int pinmap[NPINS] = {
10,6,18,15,12,4,5,8,7,16,17,19,14,9,11,13,3,2
};
void setup() {
// put your setup code here, to run once:
}
void loop() {
// put your main code here, to run repeatedly:
for (int i=0; i<NPINS; i++)
{
int anode = pinmap[i];
// Turn eveything off
for (int line=0; line<NPINS; line++)
pinMode(pinmap[line],INPUT);
// Set cathodes to LOW and anode to HIGH
for (int line=0; line<NPINS; line++)
digitalWrite(pinmap[line],LOW );
digitalWrite(anode,HIGH);
// Turn on Anode, and any cathodes we want to light-up
pinMode(anode,OUTPUT);
for (int line=0; line<NPINS; line++)
pinMode(pinmap[line],OUTPUT);
delayMicroseconds(200);
}
}
For full source code see sketch
Example 2.
3. Display buffers
At this point we're ready to start coding a display driver. The first
step is to add a display memory buffer so that other drawing routines
can turn pixels on and off.
We'll do this by storing one bit for each directed pair of LED
control lines. We'll pack this display memory into an array of 32-bit
integers, so that if the LED between line $i$ and $j$ is on, then the $j^{\mathrm{th}}$ bit of the $i^{\mathrm{th}}$ column will be
1 (and
0 otherwise). This background on
bitwise manipulations in integers might be useful.
Bit-packed representations save memory, and speed up IO operations,
both important on microcontrollers with limited RAM and slow clocks.
Since I have 18 control lines, I use a 32-bit unsigned integer (
uint32_t or
unsigned long on the Arduino). If you have fewer control lines, you can use a smaller unsigned integer type.
In the sketch below, we've modified the row/column scanning example
- We add an array of unsigned integers, which store the bits of our display buffer
- We explicitly clear the buffer in the
setup() part of the sketch
- We draw a test pattern into the buffer
- In the row-column scanning loop, we now check the display buffer to see which lights to turn on for each row.
The code:
/**
* This sketch extends Example 2, row-column scanning,
* to read data from a display buffer.
*/
#define NPINS 18
const int pinmap[NPINS] = {
10,6,18,15,12,4,5,8,7,16,17,19,14,9,11,13,3,2
};
uint32_t display_buffer[NPINS];
void setup() {
// Initialize the display memory
for (int line=0; line<NPINS; line++)
display_buffer[line]=0;
// Draw a test pattern
for (int i=0; i<NPINS; i++)
for (int j=0; j<NPINS; j++)
if (i!=j && ((i>>2)&1)==((j>>2)&1))
display_buffer[i] |= 1<<j;
}
void loop() {
// scan based on the information in the buffer
for (int i=0; i<NPINS; i++)
{
// Turn eveything off
for (int line=0; line<NPINS; line++)
pinMode(pinmap[line],INPUT);
// Set cathodes to LOW and anode to HIGH
int anode = pinmap[i];
for (int line=0; line<NPINS; line++)
digitalWrite(pinmap[line],LOW );
digitalWrite(anode,HIGH);
// Turn on Anode, and any cathodes we want to light-up
pinMode(anode,OUTPUT);
for (int line=0; line<NPINS; line++)
if (display_buffer[i]>>line&1)
pinMode(pinmap[line],OUTPUT);
delayMicroseconds(200);
}
}
For full source code see sketch
Example 3.
4. Tight loops: optimize it
So far, we've been setting the states of the IO pins individually.
This is a bit slow, so let's optimize things. On most microcontrollers
IO lines are grouped into "ports", each of which contains 8 IO pins. One
can set the state of all 8 pins simultaneously by writing an 8-bit
integer to the port. I'm using an AtMega328 board, which has three ports
(B, C, and D). Quoting the
Arduino tutorial on port manipulation, each port is controlled by three registers:
- The
DDR register sets whether pins are in input or output mode (1 means OUTPUT, 0 means INPUT)
- The
PORT register controls whether pins are high or
low, in output mode, and controls whether the internal pull-up resistor
is active in output mode (1 means HIGH, 0 means LOW)
- The
PIN register is used to read input (we won't use this)
On this project, I'm using Arduino pins 2-17. We need to refer to the
Arduino pin mapping to identify which ports these correspond to.
- Pins 2-7 correspond to PORTD 2-7
- Pins 8-13 correspond to PORTB 0-5
- Pins 14-19 correspond to PORTC 0-5
Subroutines for fast IO
First, write some helper functions to set all of the
PORT or
PIN
states for these pins at once, based on a single bit-packed
representation of the IO state. This encapsulates the translation from a
bit-packed representation of the LED-control line states into a
sequence of
PORT or
DDR register writes, simplifies the display driver design.
// Set the PORT (HIGH/LOW) status of all LED control lines
inline void PORT_LED(uint32_t states) {
PORTD = (PORTD & 0b11) | ((states & 0b111111)<<2);
states >>= 6;
PORTB = states & 0b111111;
states >>= 6;
PORTC = states & 0b111111;
}
// Set the DDR (INPUT/OUTPUT) status of all LED control lines
inline void DDR_LED(uint32_t states) {
DDRD = (DDRD & 0b11) | ((states & 0b111111)<<2);
states >>= 6;
DDRB = states & 0b111111;
states >>= 6;
DDRC = states & 0b111111;
}
Note: The inline in these function declarations tells the
compiler to insert their instructions directly in any calling function,
eliminating function-call overhead (although the compiler is free to
ignore this).
Note: When we write to port D, we first read and copy the value of the first two bits. These are the port states for Arduino pins 0 and 1.
Since I'm not using these pins for the display, I need to leave their
values unchanged. In your project, you'll need to do this for any pins
sharing a port with the LED lines, if those pins are being used for
other functions.
Preparing display data for faster IO
Now, we need to prepare bit-packed IO states to send to these
subroutines. Mapping from LED control lines to pins takes time, so we
don't want to do this inside the display scanning loop. One solution is
to ensure that your LED control lines are hooked up in a sensible way to
the underlying ports, but this isn't always possible.
A more flexible solution is to store the
display_buffer
memory in a format that is convenient for scanning the display, and
handle the pin-to-line mapping when we read/write pixels from the
display buffer.
The advantage of this approach is that Charlieplexing layouts
can be a bit weird
in terms of how pixels map to control lines. By handling this is
wrapper functions that read/write display memory, we can hide all this
messiness and expose a clean interface in terms of pixel coordinates.
// Write a 1-bit pixel to display memory
void setPixel(int i, int j, int value) {
// (add code to convert pixel to display coordinates here)
if (value)
display_buffer[pinmap[i]] |= ((uint32_t)1)<<pinmap[j];
else
display_buffer[pinmap[i]] &=~(((uint32_t)1)<<pinmap[j]);
}
// Read a 1-bit pixel from display memory
int getPixel(int i, int j) {
// (add code to convert pixel to display coordinates here)
return (display_buffer[pinmap[i]]>>pinmap[j])&1;
}
The code to scan the display is now relatively simple:
for (int i=0; i<NPINS; i++)
{
// Turn eveything off
DDR_LED(0);
// Set cathodes to LOW and anode to HIGH
uint32_t anode_mask = ((uint32_t)1)<<i;
PORT_LED(anode_mask);
// Turn on those LEDs which are on
DDR_LED(anode_mask | display_buffer[i]);
delayMicroseconds(200);
}
For full source code see sketch
Example 4.
5. Timer interrupts for multi-tasking
For uniform brightness and to avoid flicker, we need to scan through
the rows of the display at regular intervals. But, if our main loop is
dedicated to the display driver, we can't really handle much computation
for actually showing things on the display!
The solution is to move the display scanning code into a timer
interrupt routine that is called at regular intervals. There is a good
introduction to timer interrupts for the Arduino on
Adafruit, and
Appendix 2
goes into more detail. For this example we'll use the AtMega's Timer 2
for scanning the display. (This works provided we do not also use the
Tone library, which needs Timer 2 for other purposes.)
To trigger the timer interrupt routine, we need to set up Timer 2
and enable the Timer 2 overflow interrupt. I've wrapped this and the display-buffer initializer code in a new function
setup_display(), which is called when the device starts.
void setup_diplay() {
// Initialize the display memory
for (int line=0; line<NPINS; line++)
display_buffer[line]=0;
// Set up Timer2 interrupts
// Timer/counter 2 control register A
// Set to 0 do disable PWM and output-compare functions
TCCR2A = 0;
// Timer/counter 2 control register B
// The first 3 bits control the prescaler
// (i.e. clock divisor for timer tics)
// 0:off 4:64
// 1:1 5:128
// 2:8 6:256
// 3:32 7:1024
//
TCCR2A = 3;
// Enable the Timer 2 overflow interrupt
// Timer/Counter2 Interrupt Mask Register
TIMSK2 = 1;
}
We then place our display scanning code inside the Timer 2 overflow interrupt signal handler:
// Interrupt handler for scanning the display
volatile int scan_line = 0;
SIGNAL(TIMER2_OVF_vect) {
// Reset timer;
// We want to update 18 rows at 400 Hz
// I used the following python code to calculate
// the reset value, using a prescaler of 32.
//
// >>> CLOCKRATE = 16e6 # 16 MHz system clock
// >>> NLINES = 18 # 18 LED control lines
// >>> RATE = 400 # Hz; Display scan rate
// >>> PRESCALE = 32 # Timer prescaler
// >>> TIMERMAX = 256 # 256 if 8-bit, 65536 if 16-bit timer
// >>> trigger_every = (CLOCKRATE/PRESCALE)/(NLINES*RATE)
// >>> reset_to = int(TIMERMAX-trigger_every+0.5)
// >>> print('Reset the 8-bit timer to %d'%reset_to)
TCNT2 = 187;
// Scan one row of the display
DDR_LED(0);
uint32_t anode_mask = ((uint32_t)1)<<scan_line;
PORT_LED(anode_mask);
DDR_LED(anode_mask | display_buffer[scan_line]);
scan_line++;
if (scan_line>=NPINS) scan_line=0;
}
To get finer control over the scanning rate, one can manually
reset the timer in the overflow signal handler. Here, I set it to 187,
which means the timer will overflow (i.e. reach 256) again in 256-187=69
timer tics. (The other way to do this is to use an output-compare
interrupt with the 'compare to counter' mode.)
With the display-driving code out of the way, one can now add
interesting rendering code in the main program loop. As a first test,
I've set it to randomly change pixel values:
void loop() {
// The main loop is now free for implementing program logic
// For example we can randomly flip some LEDs
setPixel(random(NPINS),random(NPINS),random(2));
}
For full source code see sketch
Example 5.
6. Double buffering for better animations
Updating pixels one at a time can cause artifacts when drawing a new frame to the display. For cleaner animations, one can use
double buffering to draw the frames off-screen first, then show them all at once.
| Without double buffering |
With double buffering |
 |
 |
We define two copies of the display buffer (
buffer1 and
buffer),
as well as two pointers, one for drawing and one for scanning the
display. We alternate which pointer points to which buffer to achieve
double-buffering.
uint32_t buffer1[NPINS];
uint32_t buffer2[NPINS];
uint32_t *display_buffer;
uint32_t *drawing_buffer;
// FLip display and drawing buffers
void flipBuffers() {
uint32_t *temp = display_buffer;
display_buffer = drawing_buffer;
drawing_buffer = temp;
}
The
setPixel and
getPixel (section 4) routines are modified to use to accept a buffer pointer as a parameter.
// Write a 1-bit pixel to display memory
void setPixel(uint32_t *buff,int i, int j, int value) {
// (add code to convert pixel to display coordinates here)
if (value)
buff[pinmap[i]] |= ((uint32_t)1)<<pinmap[j];
else
buff[pinmap[i]] &=~(((uint32_t)1)<<pinmap[j]);
}
// Read a 1-bit pixel from display memory
int getPixel(uint32_t *buff,int i, int j) {
// (add code to convert pixel to display coordinates here)
return (buff[pinmap[i]]>>pinmap[j])&1;
}
In the initialization code, we assign the underlying buffers to the display/drawing pointers, and clear both display memories:
// Start with buffer 1 for display
// and buffer 2 for drawing.
display_buffer = &buffer1[0];
drawing_buffer = &buffer2[0];
// Clear the display memory
for (int line=0; line<NPINS; line++)
buffer1[line]=buffer2[line]=0;
This lets us prepare the next frame off-screen, and show it all at once. For full source code see sketch
Example 6.
Note: I'm still using the Charlieplexing grid coordinates for i and j, rather than screen coordinates. For this reason we skip the i==j slots, since these would correspond to the anode and cathode being the same pin. In your own project, you would use i and j in display coordinates, and add code in setPixel and getPixel to map these to Charlieplexing-grid coordinates.
Note: One can also synchronize the buffer-flips with the display driver.
This avoids updating the display halfway through the scan. However,
there really isn't a natural place to flip the buffers in the 'diagonal
multiplexing' layout approach I'm using here, so I omit this.
Additional extensions
The code so far illustrates the bare essentials for a working display
driver which supports one bit per pixel, runs in the background, and
supports double buffering.
This is enough for most projects, but there are a couple more fun
things to try. These include supporting multiple brightness levels per
pixel, supporting a color display, and increasing the display brightness
by calculating resistors based on average total current limits rather
than peak instantaneous limits.
Extension 1: Multiple brightness levels (more than 1-bit per pixel)

If you have CPU cycles to spare, then one can vary the brightness of pixels via
PWM. This is a tricky, however, since for $N$ control lines we're already
effectively PWM-ing each LED with a duty cycle of $1/N$. In my experience it is difficult to get more than 3 distinct brightness levels.
The way to do this is to scan through the display multiple times. The
brightest LEDs will be lit during all scans, but we'll skip
intermediate-brightness LEDs during some of the scans. For this example,
I've implement 2-bit color, which supports four states: "off", and then
three brightness levels. Human brightness perception
is nonlinear, so I double the amount of time each light is on for each brightness increment.
I scan the display three times:
- Scan 1: Duration
10 timer ticks
- Scan 2: Duration
10 timer ticks
- Scan 3: Duration
20 timer ticks
And implement 3 distinct brightness values like so:
- Pixel value
0, i.e. 0b00: Always off.
- Pixel value
1, i.e. 0b01: On during scan 1 for 10 cycles.
- Pixel value
2, i.e. 0b10: On during scans 1 and 2, for a total of 20 cycles.
- Pixel value
3, i.e. 0b11: On during all scans, for a total of 40 cycles.
An example sketch is given in
Extension 1.
Extension 2: Driving multiple LED colors in the same grid
If you mix LEDs with different forward voltages (e.g. red, green, and
blue), it can be hard to balance the current to each color channel
using fixed resistors. In this case, different LED colors may end up
with different apparent
brightnesses.
The solution to this is to separate each color into its own "virtual
row", and then scan each color separately. This prevents lower-voltage
LEDs from stealing current from higher-voltage ones. You can also adjust
the time between interrupts for each color separately to balance the
brightness of different color channels.
| Scan colors separately |
Pixel location → color |
Nice. |
 |
 |
 |
An example sketch is given in
Extension 2. This approach is also used in the
"zoom in"
sketch shown at the end of this post. These examples were optimized for
the weird spiral layout of my project, which split the lines into
"high" (blue and white LEDs) and "low" (red and green LEDs) voltage to
simplify color scanning. More generally you might need to manually
specify bit-masks for each color, with one entry per pixel.
Extension 3: Cheating on current limits for brighter displays
So far, we've been strict about not exceeding the 40 mA current limit
for our microcontroller pins, and the 100 mA peak instantaneous current
for our LEDs (see Appendix 1). Can we relax this to achieve a brighter
display?
I was hesitant to include this section because it involves doing
technically unsafe things. You don't want to exceed the microcontroller
specifications for a professional system, but as long as you're willing
to risk destroying a hobby project, why not push things a bit.
If only one LED were lit per row, then we could allocate the full 40
mA current budget to this single LED. So, for sparse displays, it might
be safe to reduce the current-limiting resistors a bit. If you enforce
that no more than $K$ LEDs are ever lit from the same row, the safe current-limiting series resistor value is:
$$R_{\text{ch}} = \frac K {K+1} \frac {V_{\text{supply}} - V_{\text{LED}}} {I_{\text{pin}}}.$$
| Strict current limits |
Average current |
Visible in diffuse daylight |
 |
 |
 |
What if we were to re-interpret the 40 mA/pin current limit as an
average current draw? This should be ok if the main thing limiting the current is heat dissipation.
That said, we still need to keep the total current draw below 200 mA for the arduino. For projects with 6 or more contorl lines, you need to set the maximum average current per pin to $200/N_{\text{pins}}$ mA (this is $200/18\approx11$ mA for my project).
Each pin needs to source $I_{\text{peak}}$ of current as anodes $1/N$ of the time, for an average current draw of $I_{\text{peak}}/N$. This current needs to go somewhere, which means that all pins are also sinking $I_{\text{peak}}/N$ of current, on average. This suggests that we can (transiently) source up to
White and blue LEDs can have a forward voltage up to ~4 V (but check
the datasheet for your specific components), giving at resistor value of
just 9.4 ohms. This is so low that I often omit resistors entirely. But
beware, this could (in theory) brick the microcontroller! Also, If your
display driver crashes without series resistors, it can send continuous
current to a single LED and burn it out. However, I find that higher
voltage LEDs can survive this, and I've never seen actual damage to the
microcontorller with these higher current draws. Under no circumstances
should you try this with red or yellow LEDs on a 5V system, as these can
burn out if there is a software glitch.
Happy hacking (:
At this point, we have constructed a LED display and verified that
the hardware works. We've written a display driver that uses row (or
column) scanning, runs in the background using timer interrupts, and
supports double-buffering.
The final thing you might want to do is modify the
setPixel and
getPixel routine to accept
display
coordinates and translate these in to coordinates on the Charlieplexing
grid. This code depends on the particular layout of your project, so I
don't include it here.
This is enough to start doing something nontrivial with the display.
I'll end the main tutorial here, but provide some additional notes and a
couple extensions at the end of this post. Here are some ideas, to get
things started:
- Implement text rendering to show messages on the display
- Render psychedelic animations
- Code up a Game of Life
- Add support for serial communication to drive the display from a computer
If you'd like, please link to your own blinkylights projects in the comments. Stay safe, stay well,
and remain indoors. Best,
-M
Appendices
Appendix 1: Current-limiting resistors
LEDs have two current ratings. The number we usually care about
is the maximum continuous current, which is usually ~5-40 mA for
discrete LEDs. When scanning multiplexed or charlieplexed arrays,
however, we briefly turn LEDs on in sequence. In this case
LEDs can handle slightly more current, and the peak instantaneous
forward current is the number we need to use. This is usually given in
the LED datasheet, and is often ~50-100 mA.
One can use this higher peak current limit to achieve a brighter display.
I
advise against this while prototyping, however: If the display driving
code stalls, it could deliver excessive current and burn out the LED.
This is especially the case with high-brightness red LEDs.
For Charlieplexing, however,
LED peak current is not the
limiting factor. Assuming we are using no additional hardware, the
current limits for IO pins on the microcontroller itself are
the limiting factor. The maximum safe current per pin on the Arduino is
40mA. When we drive multiple LEDs at a time, one should ensure
that the total current does not exceed this.
Assume that all LEDs being driven have the same forward voltage $V_\text{LED}$. We can then calculate the total series resistance as if this were a single LED with forward voltage V drawing 40mA of current. We use the Equation V=IR. In this case we have Vpower = 5V. We set the current-limiting resistor based on the difference between the supply voltage and the LED voltage. We want to find R such that
$$ V_{\text{supply}} - V_{LED} = I_{\text{LED}} R,\qquad\text{i.e.}\qquad
R = \frac {V_{\text{supply}} - V_{LED}} {I_{\text{LED}}} $$
For a 5V supply current on the Arduino, a 40mA current, and a LED with a forward voltage of 2V, we get
$$ \frac {5V-2V} {40\,\mathrm{mA}} = 75\,\mathrm{\Omega}$$
Now, the fun part. This gives the total series resistance, not the value of each resistor. Since we're using the same control lines for the anodes and the cathods, we need to distribute this 70 ohm resistance over multiple resistors. One part of the resistance will come from the resistor on the anode. The remaining part will come from the network of resistors on the cathodes.
Resistors in parallel have decreased resistance. So, for the network of cathods, we need to divide our resistor value by the number of cathodes currently active. In the example project, I light up at most 9 LEDs at a time, so I would calculate this as 9 cathodes. We need to solve for a resistor $x$ such that
$$x + \tfrac 1 9 x = 70\,\mathrm{\Omega}$$
which, in this case, solves to:
$$x = \frac 9 {9+1} \times 70\,\mathrm{\Omega} = 63\,\mathrm{\Omega}$$
In summary, the following equations give resistor values for different LED driving scenarios:
For a single LED with sustained current rating $I_{\text{cont.}}$:
$$R_{\text{cont.}} = \frac {V_{\text{supply}} - V_{\text{LED}}} {I_{\text{cont.}}} $$
For single LED, briefly pulsed with peak current rating $I_{\text{peak}}$:
$$R_{\text{peak}} = \frac {V_{\text{supply}} - V_{\text{LED}}} {I_{\text{peak}}} $$
For driving $N$ LEDs simulataneously in charlieplexing from a pin with maximum current of $I_{pin}$:
$$R_{\text{ch}} = \frac N {N+1} \frac {V_{\text{supply}} - V_{\text{LED}}} {I_{\text{pin}}}.$$
To be absolutely safe when experimenting with a charlieplexing layout, set $R$ to the minumum of $R_{\text{ch}}$ and $R_{\text{cont.}}/2$. Once the display driver code is debugged and working reliably, once can relax these constraints.
Appendix 2: AtMega328 timer interrupts
This section is surveys different ways to use display-driver timer interrupts on the Arduino. The AtMega (
datasheet) has three timers available for generating timer interrupts. On the Arduino, these
timers are used for the following functions:
- Timer0: for the Arduino functions delay(), millis() and micros().
- Timer1: for the Servo library
- Timer2: for the Tone library
- All three timers are used for the PWM pins on the Arduino
Each timer counts upwards, from 0 up to to 255 for 8-bit timers
(Timers 0 and 2), and up to 6555 for 16-bit timers (Timer 1).
AVR chips support several different ways to trigger interrupts based on
these timers. For further reading, there are many good introductions to
AVR timer interrupts online (e.g.
Adafruit,
Oscar Liang,
RobotFreak,
Amanda Ghassaei, or
Ankit Negi).
I also found
Nick Gammon's and
Pramoth Thangaval's overviews of AVR interrupts helpful.
We need to scan the rows/columns the display at a suitably high rate to avoid a visible flicker. The typical
"flicker fusion"
frequency for humans is about 60 Hz in the fovea, but higher for some
people and in the peripheral vision. A target a refresh frequency of
about 200 Hz works well. For a display with $N$ rows/columns, one must scan the rows at $N\cdot200$
Hz. (For this project, I have 18 control lines so I need to scan the
rows of the display at 3.6 kHz, or about every 280 microseconds,
ideally.)
To control the scanning/refresh rate, we need to be able to specify
the intervals between timer interrupts. There are a few ways to change
the frequency of timer interrupts on AVRs.
- One can change the system clock rate: This is possible if working with bare AVR chips.
- One can change the timer prescaler: This is the multiple of the
clock rate at which the timer "tics". E.g. a timer with a prescaler of
32 increments by one every 32 clock cycles.
- One can change the value of an "output compare" register, which sets
when then next interrupt will trigger. This quite flexible, as it
allows timer interrupts to be triggered in non-power-of-two multiples of
the timer tic rate, e.g. every 33 tics.
Option (1) is unavailable on the Arduino, since the system clock is
fixed. We also can't change timer pre-scalers (2) without disrupting
other Arduino libraries, and using approach (3) to reset the timer at a
certain value would also be disruptive.
All is not lost. It would be rare to use both the Servo and Tone
libraries on a LED display project. This means that Timers 1 and 2 will
usually be available. Smaller displays can also be run of Timer 1
without changing its configuration.
Timer interrupts as used by the Arduino environment on AtMega328-based boards
Let's look in detail how the various timers and associated interrupts
are used by the Arduino library in the default configuration. The
header file
avr/interrupt.h defines the interrupts available on AVR microcontrollers. On the AtMega328 chips, we have the following timer interrupts:
Timer 0
-
TIMER0_OVF_vect Timer 0 Overflow is used for the millisecond clock in Arduino. On a 16 MHz Arduino Uno, this counter increments every 4 μs, and overflows every 1.024 ms.
-
TIMER0_COMPA_vect and TIMER0_COMPB_vect Timer 0 Compare Match A and B are both available,
and can be used to register an interrupt routine triggered every every
1.024 ms on a 16 MHz system. This is sufficient to update a display with
16 rows/columns at 60 Hz, but only 5 rows/columns at 200 Hz.
Timer 1
-
TIMER1_COMPA_vect Timer 1 Compare Match A is unavailable if using the Servo library,
which sets Timer 1 to increment every 2 MHz (0.5 μs) on a 16 MHz
system. This is a 16-bit counter which overflows every 65,536 tics,
approximately every 32.8 ms.
-
TIMER1_COMPB_vect and TIMER1_OVF_vect Timer 1 Compare Match B and Timer 1 Overflow are available, but set to trigger every 32.8 ms if using the Servo library. This is too slow for driving a LED display.
Timer 2:
-
TIMER2_COMPA_vect Timer 2 Compare Match A; This is unavailable if using the Tone library. When playing a tone, the Tone library may reset the value of Timer 2 after a certain value that depends on the tone frequency.
-
TIMER2_COMPB_vect and TIMER2_OVF_vect Timer/Counter2 Compare Match B and Timer/Counter2 Overflow
are available, but the frequency at which these interrupts trigger
depends on the tone being played by the Tone library, and might not
trigger at all during tones. This makes it unsuitable for scanning a LED
display.
In summary, we have the following options:
- Strict compatibility with the Servo and Tone libraries leaves us with the ~1 kHz system Timer 1 output-compare interrupts A and B, which is sufficient for driving smaller displays.
- If only using one of the Servo or Tone libraries, once can use Timer
2 and Timer 1 (respectively) for display updates. This is by far the
easiest approach, provided you do not need to use these libraries.
Hacking Timer 1
Here is a hack to get ~4 kHz interrupts on the ~1 kHz Timer 1 without
disrupting any Arduino timer functionality. This is compatible with the
timer configuration for both the Servo and the Tone libraries (although
things may break if you run out of CPU cycles to handle all interrupts
promptly).
Use both output compare interrupts A and B with a phase offset of 64
tics. In the initialization code, set OCR0A to trigger on tic 0 and
OCR0B to trigger on tic 64:
// Enable Timer 0 output-compare interrupts A and B
OCR0A = 0;
OCR0B = 64;
TIMSK0 |= 6;
Move the display scanning code to its own subroutine e.g
scan_display(). Call this subroutine from
both the output-compare A and B interrupt handlers:
SIGNAL(TIMER0_COMPA_vect) {
OCR0A += 128;
scan_display();
}
SIGNAL(TIMER0_COMPB_vect) {
OCR0B += 128;
scan_display();
}